The supplied accessories include a mains and car adapter and a protective case. In my view the case is not as good as the original, but it does let you operate the button and switches without removing it. You do have to remove it to recharge the datalogger though.
During my testing I have tried to put the device to some severe tests, including seeing if I could fill the memory up. This was difficult, I had to travel around the world to achieve that.
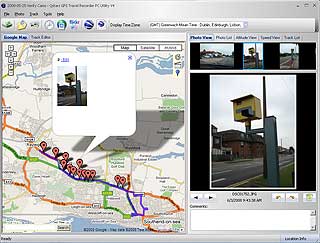
The Qstarz BT-Q1000 Platinum in action
As my more recent reviews have been about geotagging pictures for personal memories I thought it would be good to try and put the Qstarz system to a more practical use. I decided to use it as a tool to help log and identify speed cameras.
One of the things we have problems with on our speed camera database is the positioning and typing of the cameras. The main attributes of our data collection are :
1 - Position
2 - Direction
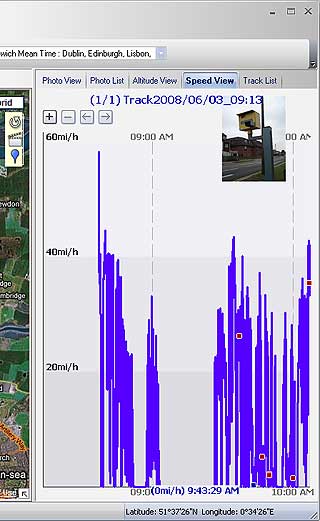
3 - Speed
4 - Type
Now I have been collecting this data for the last 7 or so years, and even now I still have problems. The main problem is memory :D (that is an admission that I am getting old) but with 50 or so locations that I verify in each trip it is really difficult to remember exactly what was at each probable location. Taking a picture helps, but then you end up with 50+ photos that mean little...
This is where the geo-tagging is indispensable. It is not perfect, but is an order of magnitude better than my memory. Using the Qstarz BT-Q1000 Platinum datalogger made an almost impossible task quite simple. The process is still not perfect, but it helps immensely.
Ideally the collection of Speed Camera data would be driving at the correct speed and taking a picture and dropping a waypoint at the exact location. This is an absolute requirement for motorways where you cannot stop. The data recorded would then include the position, direction, speed, timestamp and the picture would confirm the camera type. Obviously this is a 2 person job, with one person driving and the other recording the camera data.
The most crucial part of this process is time synchronisation between the GPS and the time on the camera. If you are traveling at 60 MPH you will be moving at about 30m per second. If the time difference is just 10 seconds your position can be out by about 300m.
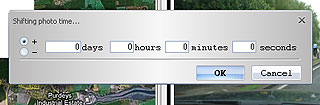
Despite my attempts to synch camera time and the GPS the time is always out a bit. Fortunately the Qstarz Travel Recorder software has a time adjust action to shift the time the photo was taken and allow you to synchronise your images perfectly. To do this I drive past a feature that is easily recognised in Google Earth and my data collector takes a picture. The quality of the image is not important, just the timestamp, in fact the faster you are traveling when you take the reference picture, the more accurate the calibration will be. When I come to process the images I locate the reference location on the map, drop a marker, and then find the track point nearest the marker. With the timestamp of the marker and the time the image was taken I can work out the time difference and then apply it to all the photos in the batch.
So we are out on the road, passing the speed cameras. As we draw alongside the camera pole the POI button is pressed recording the position, then a picture is taken. On some of the quieter roads I was able to park up and we got out of the car to take the pictures.
Having collected the pictures, POIs and tracklogs I head back to the office to process them.
Getting the data onto the PC (sorry no Mac support) is a simple matter of connecting the GPS Datalogger and starting the Qstarz Travel Recorder utility application. A click on the Read GPS Log icon will download the data into the computer. You must have the GPS in the Navigation setting.
The Travel Recorder utility organises tracks in projects. I like to keep all my activity from one surveying session in an individual project. Thus I will typically have "2008-05-25 Verify Cams" so that I can quickly identify my activities for the day.
Once the data log has been loaded I copy my photos into a separate directory. Strangely I label it something like "My Pictures/2008-05-25 Verify Cams". That way the project and the images match up quite well. I am not known for being that organised, but sometimes it helps...
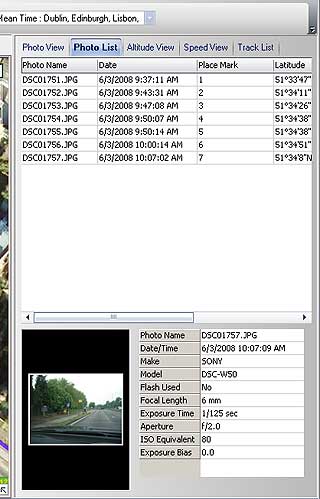
With all my source information safely stored on the computer I then start to match the images. This is a simple matter of using the menu option Photos->Add Photos...->Add Photos from Folder... then selecting the imported folder from above. This then imports the images into the project and attempts to do a match between the timestamp on the datalog and the recorded time of the picture. This will be a rough approximation until the calibration image has been processed. When the matching is complete a place marker is dropped on the map for each successfully geo-tagged image.
If you select the photo view you can now navigate through the pictures with the map being updated to a zoomed in view of the location. What I now do is locate my calibration landmark on the map and drop a marker on it. I then switch from the Google Map view to the Track Editor. I now find my calibration marker in the tracklog and the note the timestamp. Then I find my calibration image and a quick sum gives me the adjustment I need to make to bring all the images to the correct positions. The adjustment is applied by selecting the clock icon "Shift Photo Time" and entering the calculated adjustment time. The pictures markers will suddenly shift and all will come into alignment. It is difficult trying to explain this process without seeing it.
Now I have my data correctly set up all I need to do is to review the information matching the POIs I recorded to the pictures taken and a review of the location in Google Earth. Once I am happy with my results I can enter the data into the PocketGPSWorld.com website, or (as I am an administrator) I can go directly into the Speed Camera Database Maintenance application and make direct adjustments. Having a picture with the camera is so helpful not just to identify the camera, but also to remind me about the location and the circumstances I observed the camera.
|